“转自:“
来源: USim 公众号,作者:邓怡超
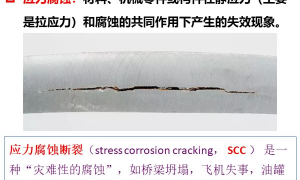
电子计算机发展起来后,有限元方法也顺势大规模地应用于工程问题,转眼也有半个多世纪了。那么,在实际的工程设计环节,试验与仿真到底什么关系?仿真多大程度上能起到指导作用?如何利用现有的分析技术,提高仿真置信度?由于工作原因,从去年的这个时候,作者开始认真思考了这几个问题,也和**公司专门搞SimV&V朋友交流过多次,这期的文章我就写一下自己这一年来的感想与总结,有误的地方欢迎指正。

问题一:试验与仿真到底什么关系?
早在石器时代,远古人类想要吃饱和安全,就寻找角岩与燧石,经验告诉他们,这样的石头锋利、可以生火,这是由经验体系出发、受客观规律约束,在宏观自然界材料中选择对象的过程;今天,现代的大多数人类吃饱了,但都还感到不安全、不方便,要搞出各种器械,不巧的是,这回是想上天,自然界材料的结构、功能完全不能实现人们对于飞行器的构想,貌似一切都要从无到有,来把头脑中的想法实现,这是由认知体系出发,受客观规律约束,在制造工艺(宏观与微观)层面操作,改造世界的过程。
认知体系与客观规律一旦冲突,就会导致永动机之类的乌龙,轻则白忙活、经济损失,重则人员伤亡。为了避免这种事情,人们搞出了各种手段(模型),通过这些手段来进行产品或部件级的性能预示(实际),其中就包括试验与计算,而有限元仿真就属于后者。

说到这,问题一已经很明确了,即仿真与试验都是手段,都是模型,都是为了模拟真实状态,从而更好地服务于设计构想的实现,优化产品,做出来靠谱的真东西。既然都是模型,那么它们就可能都是错的(极少数情况),也可能都是对的(少数情况),更可能一个准了,一个严重跑偏(大多数情况,需要修模)。
试验模型要求专门场地、安全措施,重复起来麻烦,露天的话还要看天气给不给力,操作周期长,费用昂贵,那为什么还要做试验?因为试验最容易接近真实状态,只要试验的制定、操作过程是实际状态到模型状态(全等或缩比)的相似映射,而这个是比较容易实现的。
仿真模型输入参数多,建模环节多,无法确保计算精度,大规模模型仿真严重耗时,那做仿真图个什么呢?原来,综合来说,仿真耗资较小、过程安全、重复性好,得到的结果全域的,想看哪里的响应就看哪里的响应,不会受制于传感器位置与数目,便捷高效,能明显缩短对产品性能预示过程。
而两者的优势互补,就是构成问题一的答案:
试验与仿真是互补关系,需要利用试验提高仿真精度(修模,建立虚拟样机),再通过创建的虚拟样机(验证与确认后的仿真模型)减少物理样机试验次数或取而代之(降低成本)。
问题二:仿真多大程度上能起到指导作用?
仿真的最大优势就是虚拟测试(Virtual Testing),即使没有物理样机或产品可用,也可以解决问题,这就意味着,利用CAD模型本身可以在概念阶段发现并解决问题,这里仅讨论一下有限元方法。

比如汽车碰撞测试,完全可以通过有限元仿真来完成,相比于每一种碰撞工况都需要一辆汽车来进行试验,它能节省大量的费用。

有限元在复杂结构的应力集中预测、模态频率、振型计算、产品跌落失效评估、结构优化、甚至多物理场耦合问题等方面能力也十分突出,这也是智能制造时代,仿真引领设计中它能占据重要地位的原因。一个著名的例子是Airbus公司利用达索系统的3D Experience平台设计A350,节省了大量成本。
Airbus公司在3D Experience平台设计A350▼
对于问题二,仿真多大程度上能起到指导作用?答案显然取决于它能算的多准:
通过高精度仿真模型即虚拟样机,进行虚拟测试,完全可以指导工程设计。
问题三:如何利用现有的分析技术,提高仿真置信度?
今天讨论的核心就是问题三,这是每个严肃的CAE工程师要都考虑的问题,前两个问题,思维发散是有用的,第三个则技术问题,所以下面必须都是干货。
误差定义:假定试验模型完全正确,仿真模型计算结果与有效试验数据的差别定义为仿真误差。
误差来源:总的来说前处理、求解计算、后处理都会导致误差。
-
前处理:
1、几何简化
简化结构与复杂真实结构的差别导致该部分误差。
①先确定是否用实体结构
梁或杆or实体?壳or实体?同样精度,梁杆壳计算时间远小于实体单元。

②用实体结构时几何简化到何种程度?
如果不关心某几何特征区域的应力,或者它不影响传力的话,就可以去掉该几何特征。做预分析能更好地判断传力路径,把不影响传力的倒角、凸台、小孔等特征去掉,方便网格划分。
预分析时可以采用C3D4自由网格,方便快捷地描绘应力路径,再做几何简化。
③结构对称性、载荷对称性
考虑轴、面对称,反对称,周期对称进行模型缩减。
误差抑制关键词:预分析
2、材料本构
材料力学性能参数和实际状况的差别导致该部分误差。
大多数情况下仿真的材料参数来自于材料手册,但实际上它只是一个样本数据,最好的办法是仿真时,获取同批次原材料样件的力学性能试验数据,进行材料参数校准。
Abaqus的材料参数校准模块calibration,可以直接利用试验数据拟合本构曲线(包括弹性、弹塑性、考虑永久变形的超弹性),并标定出关键参数,用标定的参数取代材料手册上的参数,可以减小由材料本构模型参数带来的仿真误差。


误差抑制关键词:材料参数校准
3、分析类型
分析判断失误导致的误差。
比如动力学问题当静力学问题分析,瞬态问题当稳态处理,非线性问题当线性问题处理等。下面是大挠度、大转角问题没考虑几何非线性与考虑几何非线性的差异,分析中一定要避免这种误差。


误差抑制关键词:选择合理的分析类型
4、网格与单元
由网格数量、单元类型导致的误差。
这种误差是数值计算本身导致的,比如由于C3D8的剪力自锁,转而使用C3D8R,使用不当,又出现沙漏现象,只好加密网格或者使用非协调模式单元C3D8I。六面体网格划分曾经是CAE工程师最纠结的问题之一,现在计算机性能提高了,复杂结构直接用高阶四面体单元完全可以保证计算精度。
基于网格提高计算精度,大致有两种方法:
-
h方法
细化网格尺寸
-
p方法
提高单元插值阶次
下图是平板椭圆孔应力集中的网格自适应分析,可以看到,网格加密到一定程度,应力趋于收敛。


从网格入手,是现代高精度有限元这个研究方向的一种热门思路,从高质量六面体网格自动生成算法到任意形状高精度单元,甚至到一种全新的、基于CAD曲面样条函数的等几何分析方法,已经突破了有限元的界限。
除适当的网格尺寸与单元阶次之外,网格要能通过质量检查,另外连接单元也要合理定义,比如对于耦合类型要考虑被耦合对象的刚度,Kinematic适合刚度大的区域,Continuum distributing适合较柔的区域;连接器(属于两节点单元)的性能参数设置必须结合实际。
误差抑制关键词:网格加密、合适的单元类型
5、边界条件
由于边界约束和实际状况的差别导致的误差。
这种误差是最常见的,影响最大。比如,简单的静力学分析,仿真时我们往往对边界进行完全的固定约束,而实际的构件,不可能做到边界自由度完全约束,总是存在有限的连接刚度。

-
试验模型约束是有限刚度边界约束
-
仿真模型约束是完全刚性边界约束
导致试验位移>仿真位移
这种情况下就需要修正边界的连接刚度,建立柔性边界仿真模型来进行分析,一种做法是建立弹簧刚度、或弹性梁边界,通过修正弹簧或梁的刚度来逼近试验模型的连接刚度。
误差抑制关键词:边界刚度修正
-
求解计算:
这个环节的误差是求解器本身的误差,对每一个新版本来说,基本上已经被软件开发团队维护到最低限度了。可以找一下帮助文档的Abaqus&NAFEMS Benchmarks和Verification Guide进行深入了解。
-
后处理:
我们会注意到,应力云图在节点的连续性往往跟一个avg75%的设置有关,那到底该用哪一种设置来作为结果进行解读呢?

基于位移法的有限元的求解过程是:
-
由平衡方程得到节点位移
-
由几何方程积分点应变
-
由物理方程得到积分点应力
-
由积分点应力、应变外推得到节点应力、应变

即我们看到的应力、应变云图是由节点位移一步步计算得来的,每一次操作,解的精度都会降低,所以,通常认为应力在积分点的解相对精确。而对于节点应力,由多个单元积分点张量外推到共享节点的结果往往是不一样的,如何将不同的张量平均到节点,就涉及到两种方法。

a.先求标量,再平均-Compute scalars before averaging(默认选项)

先求外推到节点的张量的标量,如等效应力S1、S2,对于该节点它们是否会被平均,还要看平均阈值需的设置,即△S.node/△S.region与75%(默认值,如下图可调节)的大小关系,大于则不被平均,云图在该节点不连续;小于则被平均,云图在该节点连续。

b.先平均,再求标量-Compute scalars after averaging(备用选项)

直接平均外推到节点的张量的分量,构成一个新的节点张量,再算标量,结果唯一,云图处处连续。
对于默认设置,不管阈值是多少,云图不连续的话都意味着该处网格数目不足以描述应力梯度,这时,需要更改为备用选项看一下,两种方式结果差异大小。


根据标准QJ20644—2016
-
两种设置应力差应不超过5%
-
由周边单元计算同一节点的应力差应不超过10%
如果可以满足标准,则直接解读结果,作分析依据使用;假如不能满足,那就把不连续区域网格加密,改善一下网格质量,重新计算。
误差抑制关键词:理解后处理应力平均方法,合理解读结果
总结一下:
只有每个环节的误差都小了,有限元仿真精度才能得到有效的提高,所以要严格按照有限元标准建模,用试验数据来验证、修正模型,这样有限元仿真才能在更好地指导工程设计,优化产品,节约成本,缩短研发周期。
表-有限元仿真误差来源及对策
|
有限元分析步骤 |
产生误差环节 |
对策关键词 |
|
前处理 |
几何简化 |
预分析 |
|
材料本构 |
材料参数校准 |
|
|
分析类型 |
合理的分析类型 |
|
|
网格与单元 |
网格加密、单元类型 |
|
|
边界条件 |
边界刚度修正 |
|
|
求解计算 |
运算过程 |
– |
|
后处理 |
结果解读 |
应力平均方法,合理地解读结果 |
今天分享几个有用的技巧:

1.显示体约束
施加显示体约束的部件不参与计算,只是出现在后处理中,方便你的结果展示,因此不赋属性、不划网格都可以;按复杂性,它可以设置为不动,可以跟随一点的运动,也可以跟随三点的运动来确定自己在后处理中的表现形式;此案例中设置头盔可掀起的那几个部件模仿参考点RP2运动。

2.局部坐标系
局部坐标系在定义材料方向、各种连接器、施加边界条件、后处理坐标转换等方面大有用途,学会使用局部坐标系是进行复杂结构建模、Abaqus MBD分析的基础。有直角坐标、柱坐标、球坐标三类可选,按照需要创建。

3.运动参考点
后处理时,定义运动参考点可以从视觉上一目了然地完成运动关系转换,需要注意的是,这仅仅是视觉上,结果的量化上还需要进行坐标变换,如下图,右图是选择左图中方块上的高亮红点作为参考点的运动转换。

4.渲染
渲染可以提高结果的展示性,按实际产品色彩渲染,能更好地对产品进行预示,在进行大型复杂装配体结构分析时,合理使用color code,在前、后处理阶段大大提高工作效率。

5.插入背景图片
View菜单栏下拉的image功能,可以插入图片和视频,并调整大小、透明度、位置、播放时间等。比如你想进行一个结构仿真,但只有它的照片,没有三维几何模型,这时可以插入图片,在sketch里面进行平面描绘画图,得到草图后,再附加其他空间特征,快速得到三维模型进行结构仿真分析;后处理也能插入视频与animation同步播放,进行仿真与试验过程对比。

6.动画输出
动画输出比较简单,animation下拉菜单下操作即可,可以根据需要选择视频尺寸、格式、时间帧次等。

好了,有了前面的技巧,分析完钢铁侠头盔开合动作以后,就可以做出下面这张图片了,你学会了吗?


作者已入魔,神马都是云图






来源: USim 公众号,作者:邓怡超 ,如有侵权请联系我们。

咨询和建议,请加下方小编个人微信
好看