“转自:“
“转自:“
来源丨星辰在线、环球BIM沙龙
作者丨长沙晚报记者 陈焕明 通讯员 张伟程 ,张盼龙

梅溪湖国际新城城市岛鸟瞰图
2015年12月31日,随着最后一块重15.5吨的螺旋体环道单元被吊至35米高空,并完成拼装、焊接,位于梅溪湖西岸的城市岛双螺旋观景平台实现封顶,该建筑也是世界最大双螺旋钢结构。预计2016年7月,市民就能到梅溪湖城市岛一览梅溪湖的美丽全貌。

梅溪湖国际新城城市岛项目效果图
梅溪湖城市岛位于梅溪湖西岸,紧邻CBD组团,沿湖有众多商业核心建筑,处在梅溪湖国际新城关键节点,定位为公共开敞空间。岛上的标志性构筑物为高约35米、直径约86米的双螺旋观景平台,相互环绕的两条螺旋上升环道,象征着城市的发展与自然环境相融合,成为生态之城和繁荣之城。

负责该项目施工的中建钢构梅溪湖城市岛项目部技术总工黄梅坤表示,高35米、直径约86米的双螺旋观景平台主要是由空间双曲弯扭构件组成,两条螺旋形的曲线通道采用三角支撑架结构的构筑物曲线通道,连接着一列密集的柱廊。
该建筑整体包含由8米宽坡道构成的人行通道,螺旋通往约35米的高处,站在螺旋的顶端,游客能欣赏到梅溪湖以及周边共约40公顷的规划新区风貌。

据介绍,该项目主体为纯钢结构建筑,总用钢量约7000吨,为目前世界上最大的双螺旋钢结构建筑。其复杂奇异的造型主要是由330块大小、形状完全不同的环道单元和32根斜柱构成,这给项目施工带来很大难度,对施工精度控制非常高,要求施工过程中反复调验、监测。
基于DS-102AC自动测量机器人在实际项目中的应用
一 螺旋体及人行天桥结构概况
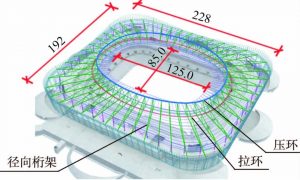
城市岛上的标志性建筑物为双螺旋观景平台,最高点约34m,环道外边界直径最大约86m,两条相互环绕螺旋上升的步道采用三角支撑架结构,连接着一列密集的柱廊。螺旋体斜立柱共32根,斜立柱与水平面的夹角为62.02°,相邻斜立柱在平面上的投影夹角为11.25°,相邻斜立柱之间以钢棒连接保证结构的整体稳定性。旋转环道平面投影内侧边界最小半径为10559mm,最大半径为36854mm。斜立柱为箱型变截面,材质为Q345B,长度约300m,沿高度方向变截面,最大截面为2600×300×28×35mm,最小截面为800×300×28×35mm,32根斜立柱为螺旋体结构重点支撑体系,其制作质量、安装精度控制及外观均有较高要求。
梅溪湖城市岛通过悬索人行天桥将岛上螺旋体建筑与岛外相连,可以通过人行天桥进出城市岛。人行天桥桥面高度约为11m,总长约280m,包含四道弧形拱,5个混凝土柱墩,10节桥段组成,桥面最宽约9.8m,桥拱最高点标高为22.85m。
天桥支撑体系采用混凝土基座支撑和弧形钢管与钢索拉吊。桥拱采用三角弧形钢管,材质为Q345B,截面尺寸为700×700×15mm,钢棒材质为Q460QC,直径为70mm,桥拱最大弧形高度为12.6m。
支撑基座分为承台、斜柱和管桩三部分。使用的混凝土等级为C40,斜柱为变截面柱。上部截面尺寸为800×800mm,下部截面尺寸为2000×2000mm。
人行天桥桥段采用圆管桁架+外包钢板组合形式,桥面为三角形截面,桁架圆管材质为Q345QC,外包钢板材质为Q235C。圆管截面尺寸最大为Ф350×30mm,最小截面尺寸为Ф121×8mm。桥段桁架与混凝土V型柱连接部分采用箱型钢管,截面为700×700×25mm,材质为Q345QC。天桥桁架内部布置有250×125×6×9mm檩条及槽钢,间距1000mm布置。天桥通过螺旋楼梯与地面连接,供行人登桥和下桥。
二、螺旋体及人行天桥结构测量原则
1、严格遵守湖南建工BIM中心专业课题申领制度中基于BIM的施工测绘精密化应用的相关要求。
2、严格执行测量规范,遵守先整体后局部的工作流程,先确定平面控制网,后以控制网为依据,进行各局部轴线的定位放线。
3、严格审核Revit模型的准确性,坚持测量放线与Revit模型同步校核的工作方法。
三、螺旋体及人行天桥结构测量概述
本工程测量主要包括螺旋体地面拼装测量和安装测量,人行天桥地面拼装测量和安装测量。平面尺寸大,空间形状复杂,杆件数量多是本工程的特点,其测量和监测重点为:

四、测量重难点分析
钢结构测量控制网是整个测量工作得以开展的基础。本工程施工范围广,施工测量控制区域大、面广,施工过程中整体平面布局变化较大。施工控制网布设的合理性、测量控制点的建立与维护,直接影响整个测量施工的成果。
对策:合理布置测量控制网,保证各控制点间同时闭合良好;根据首级控制网布设二级控制网,复测后布设三级平面控制网;分不同施工阶段调整控制网,保证各施工阶段测量控制网精确、有效;施工过程中做好控制点的标识与保护,定期地对控制点进行复测。
2、钢结构空间三维坐标定位控制
由于本工程钢结构在设计上形式独特,结构新颖,且对拼装精度控制、安装精度控制以及安装过程监测精度要求高,特别是结构的地面拼装、安装精度。如何将空间三维结构安装到设计的空间位置,控制过程极为复杂,是本工程的测量重难点之一。
对策:在普通测量基础上,BIM中心以Revit模型为基础,投入TOPCON自动照准WinCE智能全站仪(DS-102AC)和TOPCON LN-100三维放样机器人对施工过程中各重要过程进行监控与复测,着重控制拼装过程中节点相对位置精度,保证桁架的地面拼装精度;同时,计算桁架预拱值,在桁架拼装上提前考虑变形情况,在高空安装时实现整体精度控制。
3、钢结构安装误差消除
本工程空间结构复杂,构件数目多且比较大,如何消除构件在吊装过程中因自重产生的变形、因温差造成的缩胀变形、因焊接产生收缩变形等造成的误差累积,也是钢结构施工测量需重点考虑的问题。
对策:选择合理的施工吊装顺序;根据拟定的施工方案、分段及施工顺序做好计算机施工仿真分析,按照分析结果对桁架杆件做预起拱;做好安装后(焊前)结构测量,根据测量数据编制合理焊接作业指导书,通过调整焊接顺序控制焊接收缩变形引起的误差;选择合理的结构合拢点及合拢时间。
五、测量准备
1、测量人员配备
项目部设置测量技术小组,设置自动测量机器人技术辅助小组。项目部测量技术小组组长1人、测量专项技术人员3人、测量工6人;自动测量机器人技术辅助小组成员3人,根据项目总体进度计划安排统一调度。测量工程控制体系如下:

本工程结构体系复杂,测量的精度对施工安装质量极为重要,而测量仪器的精度又直接影响着测量结果的精确度。为了保证测量质量,特准备了以下科学精密的测量仪器,送指定的计量所检定,送检完的仪器、工具必须保证在符合使用的有效期内,并保留相应的检验合格证备查。

六、测量实施步骤
1、建立测量控制网(基于DS-102AC自动测量机器人)
建立轴线基准点组→建立高程水准点组→建立三级平面控制网
2、安装测量(基于TOPCON LN-100三维放样机器人)
2.1螺旋体:预埋件安装测量→钢柱安装测量→步道地面拼装测量→步道安装测量
2.2人行天桥:预埋件安装测量→支座安装测量→人行天桥桁架和环道地面拼装测量→人行天桥桁架和环道分段拼装测量
3、安装校核(基于DS-102AC自动测量机器人)
3.1螺旋体:预埋件安装校核→钢柱安装校核→步道地面拼装校核→步道安装校核
3.2人行天桥:预埋件安装校核→支座安装校核→人行天桥桁架和环道地面拼装校核→人行天桥桁架和环道分段拼装校核
4、安装变形测量控制(基于DS-102AC自动测量机器人)
安装监测→胎架卸载后测控
七、基于BIM的自动测量机器人实施应用的意义
本项目造型特异、钢结构复杂、施工精度要求高、工期短,传统的测量放样方法面临许多难以解决的问题。为了解决上述测量放样问题,在本工程使用LN-100三维放样机器人、DS-102AC自动测量机器人以保障项目生产,并着重对基于BIM的异型钢构精密化测绘进行攻关。
本项目结合BIM技术,测量放样及自动测量仪器在本工程测量、放样、校准方面的应用主要目标有以下三个方面:
1.1确保施工质量
预计将所有点的测绘精度从厘米级缩小至毫米级,为施工环节的精度实施提供保障。
1.2保障施工进度
加强深化设计与现场施工的连接,减少施工错误与返工,保障施工工期进度。
1.3节约施工成本
八、基于BIM的TOPCON LN-100三维放样机器人的实施应用
1、基于BIM的TOPCON LN-100三维放样机器人应用准备工作
1.1硬件配置:TOPCON LN-100三维放样机器人及配件、iPad等
1.2软件配置:BIM 360 Layout、Revit、Tekla等
1.3结构建模:完成需要进行放样的Revit结构建模,钢结构Revit模型可由Tekla模型直接进行转化,但须确保模型的精准度,与现场设计施工图相吻合。
1.4点位设置:在Revit模型中设置现场需放样的坐标点(平面定位、高程数据)及现场坐标控制点。
1.5导入模型:将建立好的Revit模型导入BIM 360 Layout中。
2、TOPCON LN-100三维放样机器人作业流程
BIM 360 Layout软件搭配LN-100三维放样机器人,简化施工现场精确定位BIM坐标的过程、将BIM模型的设计意图与真实世界链接、实现了工程数据从涉及到施工的无缝对接。
2.1现场使用人员只需将安装有BIM 360 Layout应用程序的iPad平板电脑利用WiFi与Topcon LN-100连接上。
九、基于BIM的DS-102AC自动测量机器人的实施应用
1、基于BIM的DS-102AC自动测量机器人应用准备工作
1.1硬件配置:DS-102AC自动测量机器人及配件等。
1.2软件配置:机载MAGNET Field等。
1.3结构建模:完成需要进行放样的Revit结构建模,钢结构Revit模型可由Tekla模型直接进行转化,但须确保模型的精准度,与现场设计施工图相吻合。
1.4校核点位设置:在Revit模型中设置现场需校核的坐标点(平面定位、高程数据)及现场坐标控制点。
1.5导入坐标:将需校核的点位坐标导入机载MAGNET Field中。
2、DS-102AC自动测量机器人作业流程
2.1作业的建立及编辑
2.1.1新建作业流程
在程序主界面点击【作业】,进入作业建立及编辑界面。点击【新建作业】。
2.1.2打开已存在作业
点击程序主界面的【作业】,进入作业界面。点击【打开作业】进入打开作业界面,在其中选择要打开的作业,点击屏幕右上方的  即可打开选择好的文件。
即可打开选择好的文件。
点击程序主界面的【作业】,进入作业界面。点击【删除作业】进入删除作业界面,在其中选择要删除的作业,点击屏幕右上方的 即可删除选择好的文件。
即可删除选择好的文件。
2.1.4导入导出作业
点击程序主界面的【交换】,进入交换界面。点击【到文件】进行作业导出工作,点击【从文件】进行作业导入工作。
2.2坐标点的输出及维护
2.2.1坐标点的输入
在程序主界面点击【编辑】,在编辑界面点击【点】。
2.2.2坐标点的编辑及删除

在上述坐标点界面,选择要编辑或删除的坐标点,选择界面下方的【删除】、【编辑】。
2.3设置测站
2.3.1后视定向

设置后视成功之后,会弹出相应的数据值,如方位角、镜高(棱镜高),水平角Hz、垂直角VA和斜距SD等,如上图所示,点 或
或 之后,即完成了测站设置。
之后,即完成了测站设置。
2.3.2后方交会
在主界面点击【设置】,进入设置测站界面,随后点击【后方交会】。
2.4点测量
坐标点测量需要测站设置结束后,在程序主界面点击【测量】,进入观测界面后点击【点测量】进入侧视测量界面。输入点号、镜高后精确照准目标,后点击测量键,进行观测保存即可。
2.5点放样
坐标点放样需要测站设置结束后,在程序主界面点击【放样】,进入观测界面后点击【点】进入点放样界面。
十、BIM与自动测量机器人集成应用的核心价值
目前,BIM与自动测量机器人集成应用包括基础工作、土建复核、施工测量、放样验收4个阶段。并具有如下三点核心价值:
1、将现场测绘得到的实际建造结构信息与模型汇总的数据对比,核对现场与模型之间的偏差,为机电、精装、幕墙等专业的深化设计提供依据。
2、结合施工现场轴线网、控制点及标高控制线,将设计成果高效快速的标定到施工现场,实现精确的施工放样,为施工员提供更加准确、直观的施工指导,提高测量放样效率。
3、在施工完成后,对现场实物进行实测实量,通过将实测数据与设计数据进行对比来检测施工质量是否符合要求,保证工程施工质量。
十一、BIM与自动测量机器人集成应用研究攻关方向
BIM与自动测量机器人集成应用的研究攻关方向将围绕以上三点核心价值开展工作,从基础的Revit建模开始,至施工现场进行自动放样实际操作,再升华至现场测绘得到的实际建造结构信息与模型汇总的数据对比,系统的研究软硬件的兼容性、放样精度分析(实测实量)、多专业数据共享、提高测量放样效率等方面。
-THE END-
来源丨星辰在线、环球BIM沙龙、筑龙BIM、转自:
“转自:”公众号,致力于推广钢结构行业新理论、新技术、新工艺、新材料及大量工程实例,介绍钢结构知识和行业资讯,搭建一个钢结构行业交流的平台。
了解更多信息,欢迎关注“转自:”公众号!